

我们都了解硬件看门狗的主要目标是对系统进行监测,以防止系统死机,并在发生死机时重置系统并重新启动。
在RTOS操作系统中,如果存在大量任务(线程),高优先级任务长时间占用着CPU资源,导致低优先级任务长时间无法执行。这种情况下,我们的系统就会出现故障。
根据上述情况,假设我们的线程没有死机,只是长时间无法执行。在这种异常情况下,我们希望采取特定代码来避免系统复位。为了解决这个问题,我们可以考虑以下方法:
关于看门狗
硬件看门狗:利用一个定时器计数电路,其定时输出连接到电路的复位端,程序在一定时间范围内对定时“喂狗”。
因此程序正常工作时,定时器总不能溢出,也就不能产生复位信号。如果程序出现故障,不在定时周期内喂狗,就使得看门狗定时器溢出产生复位信号并重启系统。
在STM32中,有两个看门狗:独立看门狗和窗口看门狗。原理和功能都类似,只是应用场景不一样。
软件看门狗:软件看门狗和硬件看门狗原理类似,都是定期(在时间溢出之内),对其喂狗。只是软件喂狗的方式是通过自身设计的计数来实现。
硬件+软件看门狗监测多任务的原理
1.利用一个监测线程(自身),来监测其它多个线程;
2.利用硬件看门狗来监测自身。
如图:

假如我系统中有多个应用线程(如上图),我就利用一个监测线程(自身),来监测其它多个应用线程。
同时,为了防止自身线程异常,利用一个硬件看门狗来监测自身。这样就可以做到双重监测的作用。
软件案例
上一节上述的原理可能对于有些人来说,是比较抽象的。那么这一节来看看代码:
监测线程(自身):
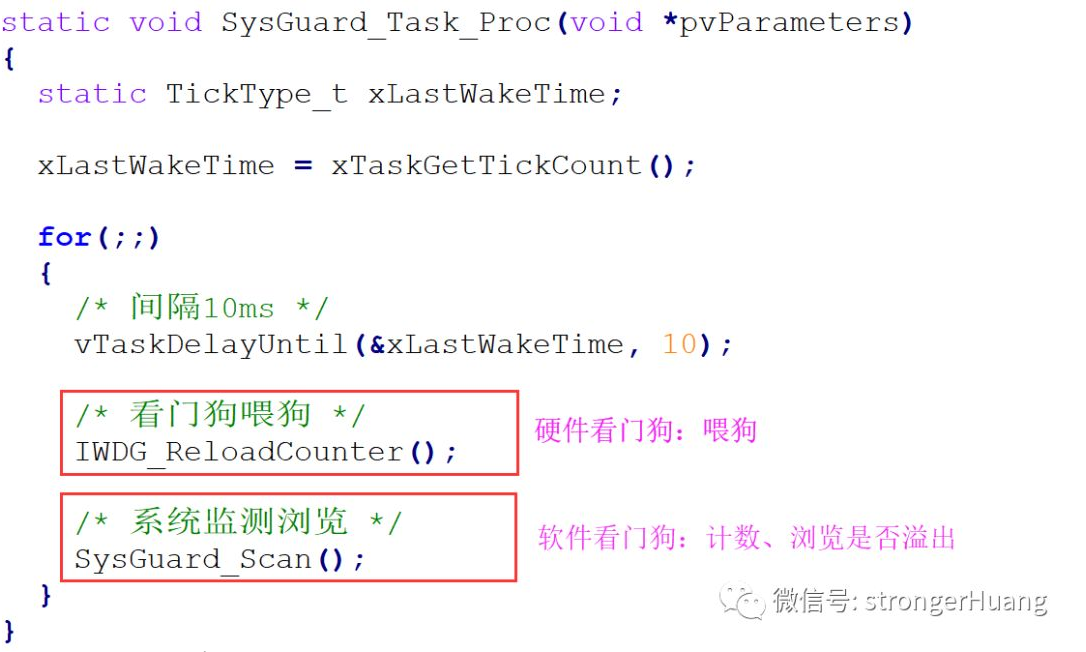
简单来说:在监测线程(自身)之中,需要对硬件看门狗进行喂狗。软件看门狗的角色:在这里就是对齐计数,浏览是否溢出,我把它封装成一个浏览函数。具体的喂狗就在其他各个被监测的线程中。
那么,再看软件看门狗对其中一个应用线程喂狗的代码:

这里只是简单的举例,一个主线程里面的喂狗。相当于:我线程启动之后,就需要定时喂狗。如果这里长时间不喂狗,那么监测线程(自身)就会发现你没有喂狗。
实现方法
看到这里,相信大家都知道其原理了。具体实现的方式方法很多种,可根据自己实际项目需要,添加相应的接口。这里举例几点吧。
定义一个数据结构:

这里举例,是实现最基础的东西,比如计数器,最大超时值等。
注册接口函数:

监测浏览函数接口:

以上就是良许教程网为各位朋友分享的Linu系统相关内容。想要了解更多Linux相关知识记得关注公众号“良许Linux”,或扫描下方二维码进行关注,更多干货等着你 !

 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

.png)

.jpg){kind=link}