

UART简介
STM32 芯片具有多个 USART 外设用于串口通讯,它是 Universal Synchronous Asynchronous Receiver and Transmitter 的缩写,即通用同步异步收发器可以灵活地与外部设备进行全双工数据交换。
有别于 USART,它还有具有 UART 外设(Universal Asynchronous Receiver and Transmitter),它是在 USART 基础上裁剪掉了同步通信功能,只有异步通信。
简单区分同步和异步就是看通信时需不需要对外提供时钟输出,我们平时用的串口通信基本都是 UART。
UART 作为异步串口通信协议的一种,工作原理是将传输数据的每个字符一位接一位地传输。
其工作原理是将传输数据的每个字符一位接一位地传输。其传输数据格式如下:

UART设备框架学习笔记
RT-Thread 提供了一套简单的 I/O 设备模型框架,它位于硬件和应用程序之间,共分成三层,从上到下分别是 I/O 设备管理层、设备驱动框架层、设备驱动层 :

应用程序访问串口设备的接口:

下面我们直接来看个实例:
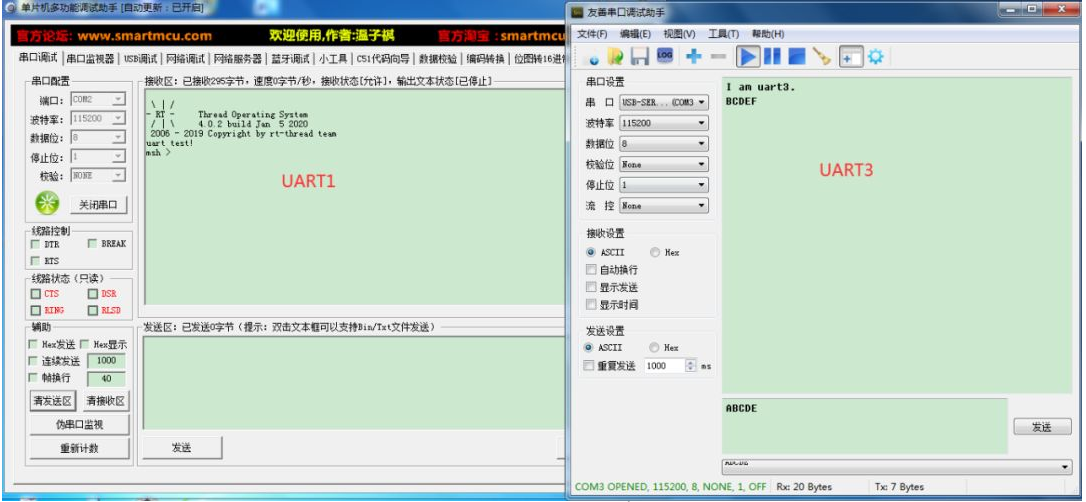
同时使用两个串口(uart1和uart3),uart1作为系统打印调试串口,用来打印一些日志信息,uart3作为我们本次实验的测试串口,实现与串口调试助手的收发测试。
uart3设备启动后,往串口调试助手发送字符串I am uart3。同时,uart3设备使用中断的方式接收数据,然后再错位输出数据,比如收到ASCII码字符A,则会回复B。
#define SAMPLE_UART_NAME "uart3" /* 串口设备名称 */
/* uart3应用函数 */
static int uart3_app(void)
{
rt_err_t ret = RT_EOK; /* 函数返回值 */
rt_thread_t tid; /* 动态线程句柄 */
char uart3_name[RT_NAME_MAX]; /* 保存查找的设备名 */
char usart3_tx_str[] = "I am uart3.\r\n"; /* uart3发送的字符串 */
rt_strncpy(uart3_name, SAMPLE_UART_NAME, RT_NAME_MAX);
/* 查找串口设备 */
uart3_dev = rt_device_find(uart3_name);
if (!uart3_dev)
{
rt_kprintf("find %s failed!\n", uart3_name);
return RT_ERROR;
}
/* 初始化信号量 */
rt_sem_init(&rx_sem, "rx_sem", 0, RT_IPC_FLAG_FIFO);
/* 以读写及中断接收方式打开串口设备 */
rt_device_open(uart3_dev, RT_DEVICE_OFLAG_RDWR | RT_DEVICE_FLAG_INT_RX);
/* 设置接收回调函数 */
rt_device_set_rx_indicate(uart3_dev, uart3_rx_callback);
/* 发送字符串 */
rt_device_write(uart3_dev, 0, usart3_tx_str, (sizeof(usart3_tx_str) - 1));
/* 创建动态线程 :优先级 25 ,时间片 5个系统滴答,线程栈512字节 */
tid = rt_thread_create("uart3_rx_thread",
static_uart3_rx_entry,
RT_NULL,
STACK_SIZE,
THREAD_PRIORITY,
TIMESLICE);
/* 创建成功则启动动态线程 */
if (tid != RT_NULL)
{
rt_thread_startup(tid);
}
return ret;
}
我们的应用程序首先根据串口设备名字uart3来查找设备,查找到设备之后则返回串口设备句柄uart3_dev。
为什么应用程序可以查找得到名字为uart3的串口设备呢?那是因为我们的硬件驱动层已经把名字为uart3的串口设备注册到系统中:


而串口设备注册函数里会调用通用的设备注册函数:

在这个流程中涉及到了如下函数:
-
uart3_app函数:在main.c文件中定义。 -
rt_hw_usart_init函数:在drv_usart.c文件中定义。 -
rt_hw_serial_register函数:在serial.c文件中定义。 -
rt_device_register函数:在device.c文件中定义。 -
rt_device_find函数:在device.c文件中定义。
在上面的RT-Thread驱动框架框图中,分为好几层,在这里的对应关系如下:

此处,main.c文件属于应用层,我们的应用程序为:

drv_usart.c文件属于硬件设备驱动层,是RT-Thread为我们提供的,其属于板级支持包中的一部分:

这一层与硬件相关,其调用底层芯片固件库,如:

“
serial.c文件属于驱动框架(驱动抽象层),是RT-Thread系统的组件:

其在RT-Thread源码中的位置如下:

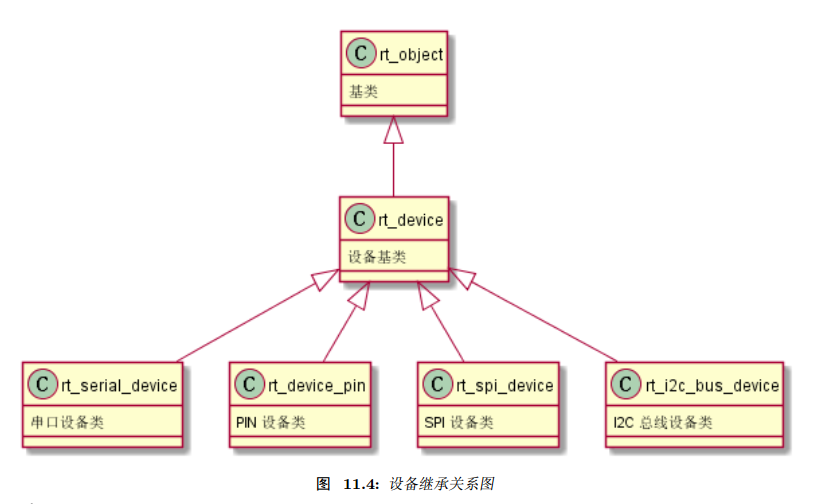
device.c文件给应用程序提供操作设备的接口,这个文件属于RT-Thread内核文件。RT-Thread 内核采用面向对象的设计思想进行设计,其中设备属于它的一类对象。其继承关系如下:
在这个应用程序中,我们用到了信号量(用其它同步机制也可以,比如事件),信号量属于IPC机制中的一种:
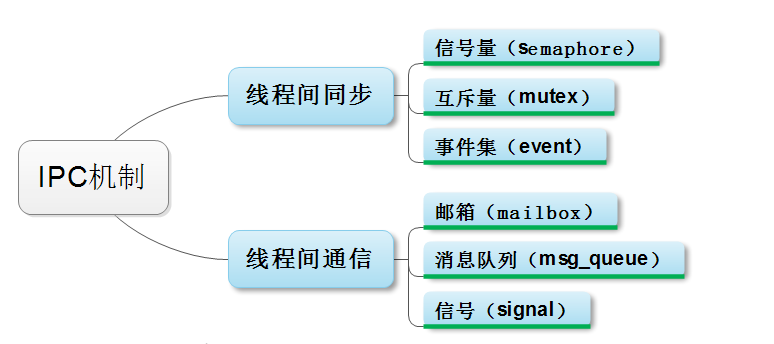
信号量用于线程与线程、中断与线程间的同步中,在我们这个实验中是中断与线程间的同步。
在裸机开发中,有这样一种场景(中断接收数据,主函数中处理数据):
在串口的接收中断函数中接收数据,然后使用一个全局变量作为中断接收的标志,有触发中断,则这个标志变量被置位;另一方面,在我们的主函数的while循环中,判断这个标志位是否被置位,若置位则进行相应的操作,并把该标志变量清零。
在RT-Thread系统中,其IPC机制做的事情与上面这个裸机开发中的标志变量做的事情类似(中断与线程同步)。比如在我们这个实验中,若uart3的接收中断被触发,则会触发回调函数,如:

回调函数中进行释放信号量操作,在线程中阻塞等待接收信号量:
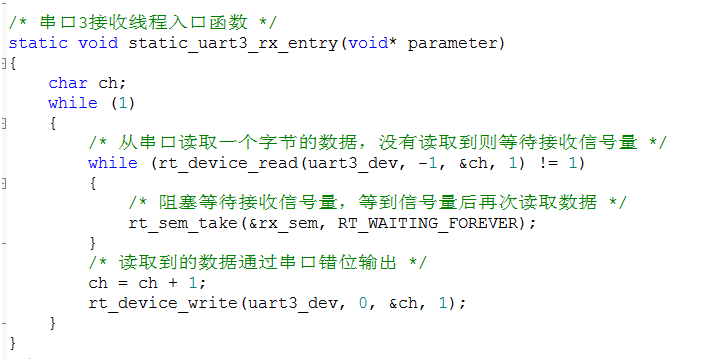
接收到数据之后,再错位发送数据。最终,我们的实验结果如下:
以上就是良许教程网为各位朋友分享的Linu系统相关内容。想要了解更多Linux相关知识记得关注公众号“良许Linux”,或扫描下方二维码进行关注,更多干货等着你 !

 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

.png)

.jpg){kind=link}