

短距离通信的同步串行通信接口,主要应用在嵌入式系统中。
SPI接口在各种设备中应用广泛,如显示模组、时钟芯片、存储芯片、温度传感器等。这些器件通常作为从设备,而单片机则充当主设备来控制它们。今天我们结合STM32来分析一些SPI通信中常见的异常问题。
STM32 SPI基础内容
绝大部分STM32芯片都有多个SPI外设,它可与外部SPI器件进行半双工/全双工同步串行通信。
1. SPI特性
-
三条线全双工、双线单工同步传输 -
支持 8 位或 16 位传输帧格式选择 -
支持主模式或从模式操作 -
可编程的时钟极性和相位 -
支持 MSB 或 LSB 数据顺序 -
支持DMA收发数据
更多特性请查阅《STM32参考手册》。
2. 引脚描述
MISO:主输入/从输出数据;
MOSI:主输出/从输入数据;
SCK:时钟(主输出,从输入时钟);
NSS:从器件选择,可理解片选信号;

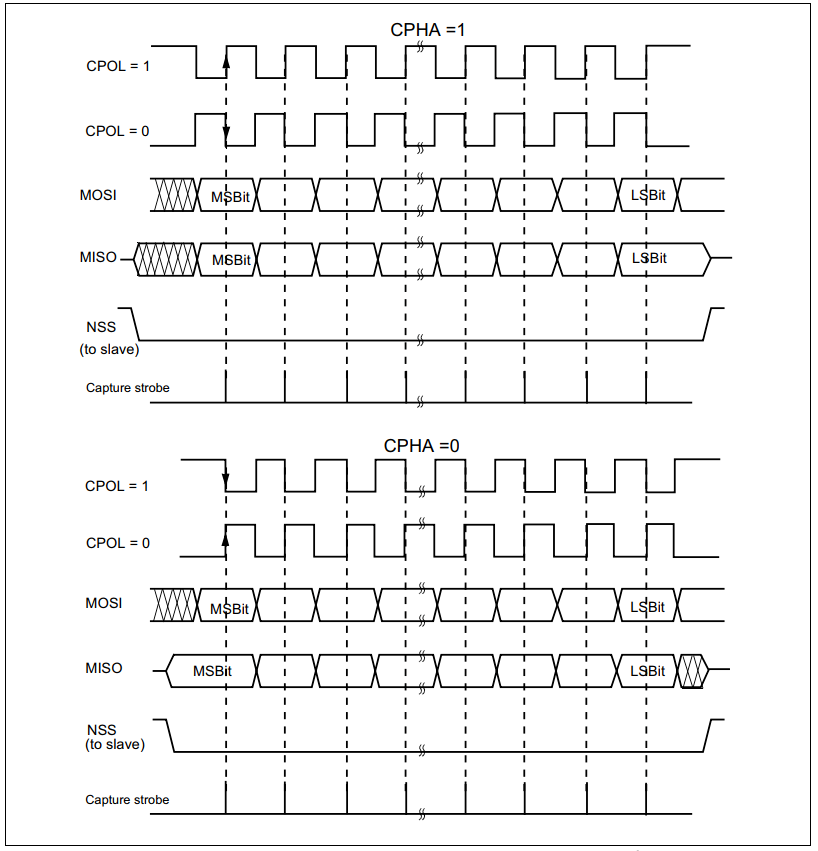
3. SPI时序
SPI的时序中有两个参数需要注意,那就是时钟相位和时钟极性。在STM32中,SPI时序由CPOL 和 CPHA 这两位来决定。
通过软件配置这两个参数,可分为四种时序关系,如下图:
4. 数据帧格式
串行同行数据传输分为 MSB 和 LSB,也就是最高有效位在前,还是最低有效位在前。(注:最左边的比特位即为最高有效位)。
比如传输一个字节:0x95(1001 0101)。

如果按照MSB(高位在前),则发送顺序:1001 0101。
如果按照LSB(低位在前),则发送顺序反过来:1010 1001。
STM32 SPI参数配置
通常STM32的SPI作为主机连接外部从机,要与从机建立正常通信,就必须与从机的参数匹配才行。
这里以【STM32作为SPI主机读写SPI Flash】为例,主要配置参数:双向全双工、主机模式、8位数据、MSB等。
1. 标准外设库配置
SPI_InitTypeDef SPI_InitStructure;
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //双向全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //主机模式
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //8位数据
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //时钟极性:空闲为高
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //时钟相位:第2个时钟沿捕获
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //软件控制NSS信号
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_4; //波特率预分频值为4
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //数据传输从 MSB 位开始
SPI_InitStructure.SPI_CRCPolynomial = 7;
SPI_Init(SPI1, &SPI_InitStructure);
▲ 左右滑动,查看完整代码
2. STM32CubeMX配置

首先选择全双工主机模式,然后再逐步配置下面参数。这里的波特率时钟灰色不可配置,由你系统时钟和分频时钟决定。
这些配置参数比较容易理解(英文清晰明了),若不懂可针对性查阅参考手册。
STM32 SPI常见问题
虽说SPI相对比较简单,但在实际应用过程中还是会存在一些奇怪的问题,下面通过案例来分析SPI常见的一些问题。
问题一:****NSS片选问题
有工程师使用硬件NSS控制从机,以为NSS信号是自动控制,导致操作从设备失败。
分析原因:STM32 SPI的NSS信号为片选信号,可“使能”为硬件控制(参看上面参数配置)。
但在应用中同样需要软件操作才能控制NSS信号(高低),比如:
SPI_NSSInternalSoftwareConfig(SPI1, SPI_NSSInternalSoft_Set);
▲ 左右滑动,查看完整代码
解决办法:按照通信时序,控制NSS信号高低(通常低有效)。
问题二:****SPI引脚复用功能问题
STM32的SPI是一种复用功能,之前使用标准外设库的工程师容易遗漏复用功能的配置导致SPI不能使用。
分析原因:SPI有些引脚对应的是特殊功能的引脚,比如:PB3(MISO)对应的是 JTDO,如果不配置则默认这个引脚的功能就是 JTDO的功能。
以前经常存在这种问题,但现在通过工具STM32CubeMX配置时自动配置了复用功能。
解决办法:参考官方提供在初始化代码中配置复用功能(同时,推荐使用HAL库)。
GPIO_PinAFConfig(GPIOA, GPIO_PinSource5, GPIO_AF_SPI1);GPIO_PinAFConfig(GPIOA, GPIO_PinSource6, GPIO_AF_SPI1);
▲ 左右滑动,查看完整代码
问题三:****时钟速率过高问题
有工程师购买一个通信为SPI的模块,最高通信速率8MB/s,他使用10.5MB/s通信速率也能用,但偶尔会出现通信异常。
分析原因:一个芯片标称的最高速率其实是相对保守的值,在条件比较好的情况下超过了最高值也能用,但不能保证稳定性。
STM32 SPI的时钟频率由系统时钟和分频决定,有的工程师没有深入理解这些参数,发现能用就不管了。
如上章节中的21MB/s,如果修改系统时钟,其实这个值会发生相应变化
解决办法:最简单的办法就是修改分频值。同时,如果环境恶劣,建议使用屏蔽线。(在保证整个产品系统实时性的同时,尽量降低通信速率)
问题四:****时钟相位问题
有不少工程师在调试SPI时会遇到数据“移位”的问题,数据能收发为什么会出现这种问题呢?
分析原因:SPI通信时钟由主机提供,本身上电时(主从)各自的信号就不稳定,如果从机时钟相位也不匹配,就会因为时钟引起数据移位,或者异常的情况。
解决办法:软件上匹配SPI主从设备的时钟相位,使用通信协议,CRC、 checksum校验等。
以上就是良许教程网为各位朋友分享的Linu系统相关内容。想要了解更多Linux相关知识记得关注公众号“良许Linux”,或扫描下方二维码进行关注,更多干货等着你 !

 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

.png)

.jpg){kind=link}