


一种名为AT命令通信解析模块,支持两种不同环境下的应用:裸机(at_chat)和操作系统版本(at)。该模块适用于各种通信设备,包括但不限于调制解调器、WIFI模块和蓝牙通信设备。
在软件架构方面,有以下两个关键组件:
-
at_chat.c、at_chat.h和list.h:这些组件适用于无操作系统环境。它们利用链式队列和异步回调的方式处理AT命令的发送和接收。同时,还支持URC(Unsolicited Response Code)处理,以及自定义命令的发送和解析任务。
-
at.c、at.h和at_util.h以及comdef.h:这些组件则适用于操作系统版本。在使用之前,需要根据at_util.h中规定的操作系统相关接口进行移植,例如提供信号量操作、任务延时等功能。
使用说明
at_chat 模块(无OS)
基本概念
at_chat 模块使用链式队列进行管理,包含2条链表,空闲链表和就绪链表。它们的每一个基本工作单元称为一个作业项,对于将要执行的命令都会放到就绪链表中,命令执行完成之后由空闲链表来进行回收,作业项的定义如下:
/*AT作业项*/
typedef struct {
unsigned int state : 3;
unsigned int type : 3; /* 作业类型*/
unsigned int abort : 1;
void *param; /* 通用参数*/
void *info; /* 通用信息指针*/
struct list_head node; /* 链表结点*/
}at_item_t;
作业是AT控制器定义时固定分配的,没有使用动态内存,默认支持10个作业项,即同时可以允许10个AT命令排队等待处理。
基本接口与描述
-
• at_send_singlline, 发送单行命令,默认等待OK响应,超时3S -
• at_send_multiline, 多行命令,默认等待OK响应,超时3S -
• at_do_cmd,支持自定义发送格式与接收匹配串 -
• at_do_work,支持自定义发送与接收解析
效果演示
详细使用可以参考Demo程序wifi_task.c模块
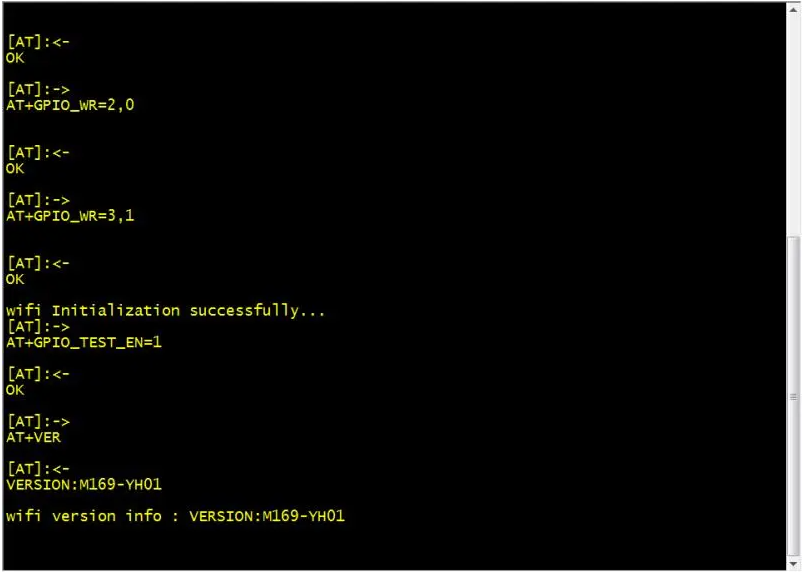
m169 wifi模组通信效果图
使用步骤
1.定义AT控制器及通信适配器接口
/*
* @brief 定义AT控制器
*/
static at_obj_t at;
const at_adapter_t adap = { //AT适配器接口
//适配GPRS模块的串口读写接口
.write = uart_write,
.read = uart_read
...
};
-
\1. 初始化AT控制器并放入任务中轮询(考虑到处理实时性,建议20ms以下)
/*
* @brief wifi初始化
*/
void wifi_init(void)
{
at_obj_init(&at, &adap);
/*...*/
}driver_init("wifi", wifi_init);
/*
* @brief wifi任务(10ms 轮询1次)
*/
void wifi_task(void)
{
at_poll_task(&at);
}task_register("wifi", wifi_task, 10);
例子演示
//WIFI IO配置命令
=> AT+GPIO_TEST_EN=1\r\n
if (r->ret == AT_RET_OK ) {
printf("Execute successfully\r\n");
} else {
printf("Execute failure\r\n");
}
}
at_send_singlline(&at, test_gpio_callback, "AT+GPIO_TEST_EN=1");
at 模块(OS版本)
由于AT命令通信是一个比较复杂的过程,对于没有OS的环境下处理难度比较大,也很绕,对于不允许阻塞程序,除了使用状态与+回调没有其它更好的办法,所以推荐使用这个模块
基本接口与描述
-
• at_do_cmd,执行AT命令,可以通过这个接口进一步封装出一常用的单行命令、多行命令。 -
• at_split_respond_lines,命令响应分割器。 -
• at_do_work,适用于发送组合命令,如GPRS模组发送短信或者发送socket数据需要等待”
使用步骤
1.定义AT控制器、通信适配器接口(包含URC回调函数表,接口缓冲区URC)
static at_obj_t at; //定义AT控制器对象
static char urc_buf[128]; //URC主动上报缓冲区
utc_item_t utc_tbl[] = { //定义URC表
"+CSQ: ", csq_updated_handler
}
const at_adapter_t adap = { //AT适配器接口
.urc_buf = urc_buf,
.urc_bufsize = sizeof(urc_buf),
.utc_tbl = utc_tbl,
.urc_tbl_count = sizeof(utc_tbl) / sizeof(utc_item_t),
//debug调试接口
.debug = at_debug,
//适配GPRS模块的串口读写接口
.write = uart_write,
.read = uart_read
};
2.创建AT控制器并创建轮询处理线程
void at_thread(void)
{
at_obj_create(&at, &adap);
while (1) {
at_process(&at);
}
}
例子演示
例子1(查询无线模组信号质量)
/** at_do_cmd 接口使用演示
查询GPRS模组信号质量命令
=> AT+CSQ
"OK", recvbuf, sizeof(recvbuf), 3000};
//
if (at_do_cmd(at, &r, "AT+CSQ") != AT_RET_OK)
return false;
//提取出响应数据
return (sscanf(recv, "%*[^+]+CSQ: %d,%d", rssi, error_rate) == 2);
}
例子2(发送TCP数据)
/** at_do_work 接口使用演示
参考自hl8518模组Socket 数据发送命令
=> AT+KTCPSND=,
params;
struct ril_sock *s = i->s;
if (s->type == SOCK_TYPE_TCP)
e->printf(e, "AT+KTCPSND=%d,%d", s->session, i->bufsize);
else
e->printf(e, "AT+KUDPSND=%d,%s,%d,%d",s->session, s->host,
s->port, i->bufsize);
if (e->wait_resp(e, "CONNECT", 5000) != AT_RET_OK) { //等待提示符
goto Error;
}
e->write(i->buf, i->bufsize); //发送数据
e->write("--EOF--Pattern--", strlen("--EOF--Pattern--")); //发送结束符
if (e->wait_resp(e, "OK", 5000) == AT_RET_OK)
return true;
else {
Error:
e->write("--EOF--Pattern--", strlen("--EOF--Pattern--"));
return false;
}
}
/**
* @brief socket 数据发送
* @param[in] s - socket
* @param[in] buf - 数据缓冲区
* @param[in] len - 缓冲区长度
*/
static bool hl8518_sock_send(ril_obj_t *r, struct ril_sock *s, const void *buf,
unsigned int len)
{
struct socket_info info = {s, (unsigned char *)buf, len, 0};
if (len == 0)
return false;
return at_do_work(&r->at, (at_work)socket_send_handler, &info);
}
以上就是良许教程网为各位朋友分享的Linu系统相关内容。想要了解更多Linux相关知识记得关注公众号“良许Linux”,或扫描下方二维码进行关注,更多干货等着你 !
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

.png)

.jpg){kind=link}